§ 56. МАТЕМАТИЧЕСКИЙ МАЯТНИК. Вопросы
1. Какие силы действуют при движении математического маятника?
1. При движении математического маятника действуют сила тяжести FT = m g и сила упругости Fупр натянутой нити.
2. Какими должны быть нить и подвешенный к ней груз, чтобы маятник можно было считать математическим?
2. Математическим маятником называется подвешенный к тонкой нити груз, размеры которого много меньше длины нити, а его масса много больше массы нити. То есть тело и нить должны быть такими, чтобы груз можно было считать материальной точкой, а нить невесомой.
3. При каких отклонениях от положения равновесия колебания маятника будут гармоническими?
3. Колебания математического маятника будут гармоническими при малых углах отклонения.
4. Чему равен период колебаний маятника с длиной подвеса 1 м?

5. Как изменится период колебаний маятника, если заменить груз другим, по массе вдвое меньшим?
5. Период колебаний математического маятника не изменится, так как он не зависит от массы подвешенного груза и амплитуды колебаний.
6. Как изменится период колебаний маятника, если уменьшить длину подвеса в 4 раза?
6. Период колебаний уменьшится в два раза, так как Т
7. Справедлива ли формула (3) предыдущего параграфа для математического маятника?

7. Справедлива, так как она описывает любые гармонические колебания.
Учебники
Журнал «Квант»
Общие
Математический маятник. Период колебаний математического маятника
Математическим маятником называют материальную точку, подвешенную на невесомой и нерастяжимой нити, прикрепленной к подвесу и находящейся в поле силы тяжести (или иной силы).
Исследуем колебания математического маятника в инерциальной системе отсчета, относительно которой точка его подвеса находится в покое или движется равномерно прямолинейно. Силой сопротивления воздуха будем пренебрегать (идеальный математический маятник). Первоначально маятник покоится в положении равновесия С. При этом действующие на него сила тяжести \(\vec F\) и сила упругости \(\vec F_
Выведем маятник из положения равновесия (отклонив его, например, в положение А) и отпустим без начальной скорости (рис. 13.11). В этом случае силы \(\vec F\) и \(\vec F_
a_n\), которое изменяет при этом направление вектора скорости, и маятник движется по дуге ABCD.
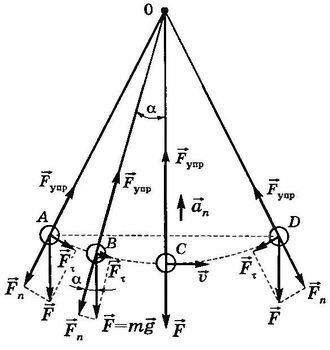
Чем ближе подходит маятник к положению равновесия С, тем меньше становится значение тангенциальной составляющей \(
F_\tau = F \sin \alpha\). В положении равновесия она равна нулю, а скорость достигает максимального значения, и маятник движется по инерции дальше, поднимаясь по дуге вверх. При этом составляющая \(\vec F_\tau\) направлена против скорости. С увеличением угла отклонения а модуль силы \(\vec F_\tau\) увеличивается, а модуль скорости уменьшается, и в точке D скорость маятника становится равной нулю. Маятник на мгновение останавливается, а затем начинает двигаться в обратном направлении к положению равновесия. Вновь пройдя его по инерции, маятник, замедляя движение, дойдет до точки А (трение отсутствует), т.е. совершит полное колебание. После этого движение маятника будет повторяться в уже описанной последовательности.
Получим уравнение, описывающее свободные колебания математического маятника.
Пусть маятник в данный момент времени находится в точке В. Его смещение S от положения равновесия в этот момент равно длине дуги СВ (т.е. S = |СВ|). Обозначим длину нити подвеса l, а массу маятника — m.
Из рисунка 13.11 видно, что \(
F_\tau = F \sin \alpha\), где \(\alpha =\frac
Знак минус в этой формуле ставят потому, что тангенциальная составляющая силы тяжести направлена к положению равновесия, а смещение отсчитывают от положения равновесия.
Согласно второму закону Ньютона \(m \vec a = m \vec g + F_
Из этих уравнений получим
a_x + \omega^2x = 0\) (см. § 13.3), можно сделать вывод, что математический маятник совершает гармонические колебания. А так как рассмотренные колебания маятника происходили под действием только внутренних сил, то это были свободные колебания маятника. Следовательно, свободные колебания математического маятника при малых отклонениях являются гармоническими.
Обозначим \(\frac
Период колебаний маятника \(T = \frac<2 \pi><\omega>.\) Следовательно,
Это выражение называют формулой Гюйгенса. Оно определяет период свободных колебаний математического маятника. Из формулы следует, что при малых углах отклонения от положения равновесия период колебаний математического маятника: 1) не зависит от его массы и амплитуды колебаний; 2) пропорционален корню квадратному из длины маятника и обратно пропорционален корню квадратному из ускорения свободного падения. Это согласуется с экспериментальными законами малых колебаний математического маятника, которые были открыты Г. Галилеем.
Подчеркнем, что эту формулу можно использовать для расчета периода при одновременном выполнении двух условий: 1) колебания маятника должны быть малыми; 2) точка подвеса маятника должна покоиться или двигаться равномерно прямолинейно относительно инерциальной системы отсчета, в которой он находится.
Если точка подвеса математического маятника движется с ускорением \(\vec a\) то при этом изменяется сила натяжения нити, что приводит к изменению и возвращающей силы, а следовательно, частоты и периода колебаний. Как показывают расчеты, период колебаний маятника в этом случае можно рассчитать по формуле
g’\) — «эффективное» ускорение маятника в неинерциальной системе отсчета. Оно равно геометрической сумме ускорения свободного падения \(\vec g\) и вектора, противоположного вектору \(\vec a\), т.е. его можно рассчитать по формуле
\(\vec g’ = \vec g + (- \vec a).\)
Литература
Аксенович Л. А. Физика в средней школе: Теория. Задания. Тесты: Учеб. пособие для учреждений, обеспечивающих получение общ. сред, образования / Л. А. Аксенович, Н.Н.Ракина, К. С. Фарино; Под ред. К. С. Фарино. — Мн.: Адукацыя i выхаванне, 2004. — С. 374-376.
Физика Б1.Б8.
Электронное учебное пособие по разделу курса физики Механика
Механика – это раздел физики, который изучает наиболее простой вид движения материи – механическое движение и причины, вызывающие или изменяющие это движение.
Механика состоит из трех разделов: кинематики, динамики и статики. Кинематика дает математическое описание движения, не касаясь причин, которыми вызвано движение. Динамика – основной раздел механики, она изучает законы движения тел и причины, которыми вывзывается движение и его изменение. Статика изучает законы равновесия системы тел под действием приложенных сил. Мы ограничимся изучением двух основных разделов – кинематики и динамики.
Введение
Механика – это раздел физики, который изучает наиболее простой вид движения материи – механическое движение и причины, вызывающие или изменяющие это движение.
Механическое движение – это изменение во времени взаимного расположения тел или частей одного и того же тела. Причиной, вызывающей механическое движение тела или его изменение, является воздействие со стороны других тел.
Развитие механики началось еще в древние времена, однако, как наука она формировалась в средние века. Основные законы механики установлены итальянским физиком и астрономом Г. Галилеем (1564-1642) и английским ученым И. Ньютоном (1643-1727).
Механику Галилея-Ньютона принято называть классической механикой. В ней изучается движение макроскопических тел, скорости которых значительно меньше скорости света с в вакууме. Законы движения тел со скоростями, близкими к скорости света сформулированы А. Эйнштейном (1879-1955), они отличаются от законов классической механики. Теория Эйнштейна называется специальной теорией относительности и лежит в основе релятивистской механики. Законы классической механики неприемлемы к описанию движения микроскопических тел (элементарных частиц – электронов, протонов, нейтронов, атомных ядер, самих атомов и т.д.) их движение описывается законами квантовой механики.
Механика состоит из трех разделов: кинематики, динамики и статики. Кинематика дает математическое описание движения, не касаясь причин, которыми вызвано движение. Динамика – основной раздел механики, она изучает законы движения тел и причины, которыми вывзывается движение и его изменение. Статика изучает законы равновесия системы тел под действием приложенных сил. Мы ограничимся изучением двух основных разделов – кинематики и динамики.
В механике для описания движения в зависимости от условий решаемой задачи пользуются различными упрощающими моделями: материальная точка, абсолютно твердое тело, абсолютно упругое тело, абсолютно неупругое тело, и т.д. Выбор той или иной модели диктуется необходимостью учесть в задаче все существенные особенности реального движения и отбросить несущественные, усложняющие решение.
Материальная точка – это тело обладающее массой, размеры и форма которого несущественны в данной задаче. Любое твердое тело или систему тел можно рассматривать как систему материальных точек. Для этого любое тело или тела системы нужно мысленно разбить на большое число частей так, чтобы размеры каждой части были пренебрежимо малы по сравнению с размерами самих тел.
Абсолютно твердое тело – это тело, расстояние между любыми точками которого остается неизменным в процессе движения или взаимодействия. Эта модель пригодна, когда можно пренебречь деформацией тел в процессе движения.
Абсолютно упругое и абсолютно неупругое тело – это два предельных случая реальных тел, деформациями которых можно и нельзя пренебречь в изучаемых процессах.
Любое движение рассматривается в пространстве и времени. В пространстве определяется местоположение тела, во времени происходит смена местоположений или состояний тела в пространстве, время выражает длительность состояния движения или процесса. Пространство и время –это два фундаментальных понятия, без которых теряется смысл понятия движения: движения не может быть вне времени и пространства.
Свободные колебания. Математический маятник
Математическим маятником называют тело небольших размеров, подвешенное на тонкой нерастяжимой нити, масса которой пренебрежимо мала по сравнению с массой тела. В положении равновесия, когда маятник висит по отвесу, сила тяжести  уравновешивается силой натяжения нити
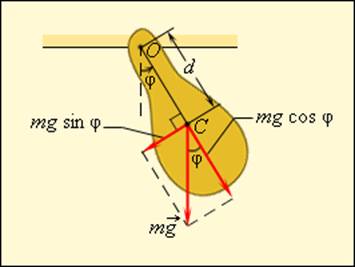
уравновешивается силой натяжения нити  При отклонении маятника из положения равновесия на некоторый угол φ появляется касательная составляющая силы тяжести Fτ = –mg sin φ (рис. 2.3.1). Знак «минус» в этой формуле означает, что касательная составляющая направлена в сторону, противоположную отклонению маятника.
При отклонении маятника из положения равновесия на некоторый угол φ появляется касательная составляющая силы тяжести Fτ = –mg sin φ (рис. 2.3.1). Знак «минус» в этой формуле означает, что касательная составляющая направлена в сторону, противоположную отклонению маятника.
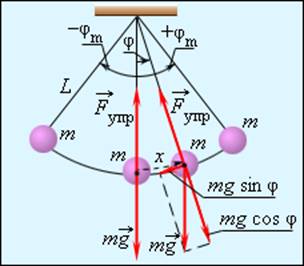
Математический маятник. φ – угловое отклонение маятника от положения равновесия, x = lφ – смещение маятника по дуге
Если обозначить через x линейное смещение маятника от положения равновесия по дуге окружности радиуса l, то его угловое смещение будет равно φ = x / l. Второй закон Ньютона, записанный для проекций векторов ускорения и силы на направление касательной, дает:
Это соотношение показывает, что математический маятник представляет собой сложную нелинейную систему, так как сила, стремящаяся вернуть маятник в положение равновесия, пропорциональна не смещению x, а
Только в случае малых колебаний, когда приближенно  можно заменить на
можно заменить на  математический маятник является гармоническим осциллятором, т. е. системой, способной совершать гармонические колебания. Практически такое приближение справедливо для углов порядка 15–20°; при этом величина
математический маятник является гармоническим осциллятором, т. е. системой, способной совершать гармонические колебания. Практически такое приближение справедливо для углов порядка 15–20°; при этом величина  отличается от
отличается от  не более чем на 2 %. Колебания маятника при больших амплитудах не являются гармоническими.
не более чем на 2 %. Колебания маятника при больших амплитудах не являются гармоническими.
Для малых колебаний математического маятника второй закон Ньютона записывается в виде
Таким образом, тангенциальное ускорение aτ маятника пропорционально его смещению x, взятому с обратным знаком. Это как раз то условие, при котором система является гармоническим осциллятором. По общему правилу для всех систем, способных совершать свободные гармонические колебания, модуль коэффициента пропорциональности между ускорением и смещением из положения равновесия равен квадрату круговой частоты:
Эта формула выражает собственную частоту малых колебаний математического маятника.
 |
 . Это означает, что только при малых углах
. Это означает, что только при малых углах , когда
, когда , физический маятник способен совершать свободные гармонические колебания. В случае малых колебаний
, физический маятник способен совершать свободные гармонические колебания. В случае малых колебаний

 в этом уравнении имеет смысл квадрата круговой частоты свободных гармонических колебаний физического маятника.
в этом уравнении имеет смысл квадрата круговой частоты свободных гармонических колебаний физического маятника.