Это фейк!
Don’t ruin your experience.
Open the attachment first! …… watch the video before reading the explanation below
Watch first, then read the text.
What appears to be a beautiful performance by two incredibly talented dancers is actually a glimpse of the future in Aldous Huxley’s «Brave New World.».
This classical dance was created in China and broadcast at Shanghai Disneyland. They are not dance artists, but robots made in China. The performance time is only about 5 minutes, but the waiting time for tickets is 4 hours, and the ticket price is 499 yuan ($75). It is more complex than Japan’s and has perfect facial expressions. Both dancers are robots. They look so real that they cannot be distinguished from actual people.Scares the hell out of me!
Посмотрев несколько секунд, я увидел, что танцуют конечно люди, профессиональные танцоры, которые даже не пытаются изображать угловатость движений роботов. Это видео я не ставлю, мне лень его выгружать на YouTube. Но зато я нашел там другое видео, которое уже выгружено на YouTube:
Why Would Someone Create This Fake Story?
With China’s aggressive foreign stance in recent years, it is not uncommon to see such fake stories being created and shared.
Some believe it’s part of a concerted attempt to burnish China’s image overseas.
Others believe the many fake stories are being created to drown out the negative coverage of China’s controversial Belt and Road Initiative, and their aggressive moves in the South China Sea.
Whatever the reasons may be, it is our duty as global citizens to stop the proliferation of such fake stories.
(Почему кто-то создал этот фейк?
Учитывая агрессивную внешнюю политику Китая в последние годы, нередки случаи, когда создаются и распространяются такие фейки.
Некоторые считают, что это часть согласованной попытки улучшить имидж Китая за рубежом.
Другие полагают, что множество фейков создается, чтобы заглушить негативное освещение скандальной китайской инициативы «Один пояс, один путь» и их агрессивных действий в Южно-Китайском море.
Какими бы ни были причины, наш долг остановить распространение подобных фейков.)
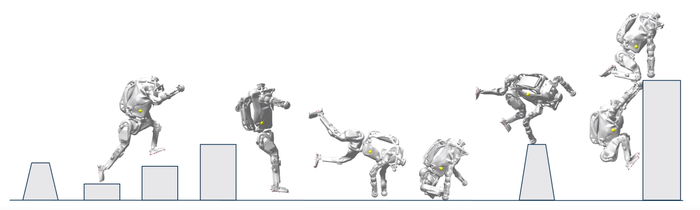
Как Boston Dynamics научили своих роботов танцевать
Перевод интервью с вице-президентом по разработке Boston Dynamics
В конце декабря компания Boston Dynamics опубликовала на своем Youtube-канале танец роботов Atlas, Spot и Handle под песню «Do you love me». На текущий момент видео набрало более 26 миллионов просмотров.
Строго говоря, роботы в этом видео не делают ничего такого, чего они не делали бы ранее. Тем не менее, это все равно выдающееся достижение робототехники. Уникальной является художественная составляющая видео, которая разрабатывалась совместно с хореографом Моникой Томас. Мы видели, как Atlas выполняет простые задания, занимается гимнастикой и паркуром, но танцы – это что-то новое для него. Чтобы узнать больше о том, как это было сделано, мы взяли интервью и Аарона Сондерса, вице-президента по разработке Boston Dynamics (VP of Engineering).
Сондерс начал работать в Boston Dynamics в 2003 году, то есть он принимал участие в разработке большей части роботов Boston Dynamics, даже тех, про которых все уже забыли (например, Little Dog). Сондерс участвовал в проекте Atlas с самого начала, и последние несколько лет занимался исключительно им. Он согласился ответить на наши вопросы о танцующих роботах.
Что вы можете сказать о реакции интернета на ваше видео?
От каждого видео, которые мы публикуем, мы ожидаем чего-то своего. В этом случаеречь шла в первую очередь о веселье. Мы получили рекордное количество отзывов на Youtube, писем и звонков от людей, которые выражали энтузиазм и делились идеями о том, что нам стоит сделать дальше, какую песню использовать, и так далее.
Мое любимое сообщение прислала 94-летняя бабушка. Она посмотрела видео на Youtube и попросила своих родственников спросить у нас, кто обучил роботов этим крутым движениям. Это видео охватило более широкую аудиторию благодаря сочетанию старой музыки и современных технологий.

Раньше Atlas не двигался таким образом. Можете рассказать немного о том, как это получилось?
Мы начали работать с танцорами и хореографом, чтобы создать набросок танца. Самым сложным было провести коррекцию движений танцоров-людей с тем, чтобы их могли повторить танцоры-роботы. Мы использовали симулятор и вместе с хореографом перебирали возможные движения, которые будут под силу Атласу и другим роботам. Это был итеративный процесс: танцоры показывали нам движения, инженеры переносили их в симуляции и говорили, насколько легко робот сможет их повторить. Мы постоянно обсуждали, пробовали симулировать разные вещи и делали мелкие поправки, чтобы получить набор движений, совместимых с роботами.
С развитием проекта длительность итераций становилась все меньше и меньше благодаря созданию специализированных инструментов под эту задачу. В конце концов, используя эти инструменты, мы создали полную хореографию для одного из роботов всего за один день перед началом съемок. Не совсем корректно называть движения роботов «вручную заскриптованными», каждое движение было создано танцором и перенесено на робота с помощью созданных инженерами инструментов.
Какие движения было тяжелее всего перенести с людей на робота? Были ли движения, с которыми Атлас справился лучше, чем танцор-человек?
Обороты вокруг своей оси и балетные движения были самыми сложными, потому что они больше всего отличались от бега и прыжков, с которыми у нас уже был опыт работы. Они стали испытанием как для роботов, так и для программного обеспечения. В начале мы недооценивали силу и гибкость танцоров, роботу очень сложно повторить движения элитных атлетов. Я думаю, что Атлас не обладает диапазоном движений и силы людей-атлетов. Но мы продолжаем разрабатывать наших роботов в этом направлении. Для того, чтобы использовать гуманоидных роботов на производстве и в домашних условиях, мы должны достичь такого уровня производительности.
Роботы лучше людей в одном: они могут повторять одно и то же действие много раз подряд с высокой точностью повторения. Поэтому после начального программирования роботы могли повторять танец снова и снова, а мы тем временем экспериментировали с объективами камер.
Я понимаю, как вы использовали людей для постановки танца Атласов, но что вы делали с роботами Spot и Handle?
Люди, с которыми мы работали, очень талантливы во всем, что касается самовыражения через движение. Наши роботы очень динамично движутся и хорошо балансируют. Танцоры отлично понимали, как движутся роботы, вне зависимости от того, сколько у них ног – две или четыре. Если у вас нет готового шаблона движения животного или поведения человека, вам нужно думать более тщательно над реализацией, это справедливо и для коммерческих решений.
Каким образом ваш опыт в обучении роботов танцам, гимнастике и паркуру влияет на ваш подход к коммерческой робототехнике?
Мы считаем, что навыки, лежащие в основе танца и гимнастики, такие как ловкость, баланс и восприятие, являются фундаментальными для широкого ряда задач робототехники. Рецепт робототехники от Boston Dynamics – смесь создания роботов с новыми возможностями и веселья. Например, обучая роботов новым динамичным движениям за короткий срок, всего за несколько дней, позволяют нам лучше изучить возможности нашего железа.
Благодаря тому, что мы запустили продажи Спота, он практически перестал нуждаться в поддержке. Теперь он может танцевать сутки напролет. И мы добились этого именно благодаря тому, что раньше казалось абсурдным и веселым. Для того, чтобы научиться новым вещам, нужно зайти на неизведанную территорию.
Просматривая видео на Ютубе, невозможно сказать, как много времени вам потребовалось, чтобы все заработало как надо, и соответствует ли показанное в видео полным возможностям роботов. Что вы можете сказать об этом?
Я отвечу в контексте видео «Do you love me», но это справедливо и для других видео, которые мы снимаем. Мы тяжело трудимся над каждым нашим творением. Большая часть контроллеров Атласа были разработаны в предыдущих проектах. Работая над паркуром для Атласа, мы создали контроллеры с предсказанием модели, которые брали во внимание динамику и баланс. Эти контроллеры использовались, чтобы выполнять движения танца, разработанные совместно с хореографом и танцорами. Мы потратили месяцы на постановку танца и итерации в симуляторе.
Для танца требовалась сила и скорость, нам даже пришлось обновить часть железа Атласа, чтобы усилить его. На текущий момент этот танец требовал больше всего усилий от наших роботов. Может показаться, что паркур требует больших усилий, но это не так. Нам также потребовалось много времени, чтобы сопоставить возможности машины с возможностями алгоритмов.
После того, как мы разработали финальную версию последовательности движений, мы потратили всего два дня на съемки. Мы потратили большую часть этого времени, чтобы проработать траекторию движения оператора с камерой между движущимися роботами так, чтобы все движения попали на видео. Мы сняли первые две минуты видео без склеек.
Железо несколько раз подводило нас, иногда роботы спотыкались и падали. То, что делают наши роботы, не является надежным на 100%, но мы стараемся не обманывать наших будущих клиентов и показывать действия, которые могут быть повторены с большой степенью надежности. Нужно проявлять честность, если заявляешь, что добился чего-то, это требование является важным для нас.
Вы упомянули, что Спот может танцевать целый день. А что насчет Атласа? Если включить его в розетку, он сможет танцевать целый день?
Атлас не такой надежный механизм, как Спот. Существует всего несколько Атласов, они сложно устроены, и надежность не является главным требованием на этом этапе. Время от времени наши Атласы ломаются. Но в контексте танца, который мы пытались исполнить, надежность железа была на высоком уровне. А без надежности мы вовсе не смогли бы снять подобное видео. В этом плане Атлас похож на вертолет: помимо выполнения основной функции, много времени требуется на техническую поддержку. Спот же в этом плане больше похож на автомобиль – вы можете использовать его довольно долго, прежде чем ему потребуется техническое обслуживание.
Когда вы обучаете Атласа новым трюкам, это похоже на обычное машинное обучение?
В нашей компании мы использовали много разных подходов, но Атлас в данный момент не использует обучающийся контроллер. Возможно, однажды этот день настанет. Во время танца Атлас использовал комбинацию следующих подходов: реакция на приложенные силы, онлайн и оффлайн оптимизация траектории, и контроллер с предсказанием модели. Мы используем эти подходы, потому что они надежные, позволяют добиться высокой производительности, и мы хорошо понимаем, как с ними работать. Мы все еще не раскрыли полный потенциал этих методов.
Мы планируем использовать алгоритмы машинного обучения для улучшения софта и железа наших роботов, но нам, как и всему остальному сообществу робототехников, еще предстоит найти оптимальный способ использования этих методик. Думаю, это будет естественной частью нашего прогресса.
Большая часть динамических движений Атласа в данный момент происходит из нижней части его тела. Паркур также использует силу и ловкость верхней части тела. Недавно мы видели картинки, на которых Атлас подтягивается. Расскажите нам об этом.
Люди и животные делают невероятные вещи с помощью своих ног, и еще более невероятные вещи, когда используют все тело целиком. Мне кажется, паркур – это идеальная задача, чтобы раскрыть полный потенциал мобильности тела робота. Ходьба и бег были только началом этого пути. Последние несколько лет мы работали над такими динамическими движениями, как прыжки и повороты. Следующий шаг – исследовать, как можно увеличить ловкость робота за счет использования рук.
Одна из задач, которые стоят перед командой разработчиков Атласа, это использование рук в той же степени, в которой мы используем ноги. Я с большим энтузиазмом ожидаю результатов, которые мы получим в ближайшие несколько лет. Это позволит нам делать еще больше интересных вещей с нашими роботами.
Поделитесь своим мнением об использовании гидравлических и электрических моторов в динамичных роботах.
За время моей карьеры в Boston Dynamics я часто предпочитал ту или иную технологию. Сейчас я пришел к пониманию того, что каждая технология должна использоваться по назначению. Выбор актуаторов зависит от размера робота, от задач, которые будут стоять перед роботом, и от множества других факторов. В идеале, у вас под рукой должны быть актуаторы обоих типов. Мы использовали оба типа в различных роботах с большим успехом.
Мне кажется, основное различие между электрическими и гидравлическими актуаторами заключается в масштабе. Очень сложно создать миниатюрный гидравлический актуатор, то же самое касается гигантских электрических моторов. Фактор масштаба является решающим в некоторых случаях при выборе между этими двумя технологиями.
Кроме ваших проектов в Boston Dynamics, какие еще роботехнические проекты вызывают в вас энтузиазм?
Для нашей компании, огромную важность играет прогресс в области сенсоров, компьютерного зрения, восприятия местности. Чем сильнее развиваются эти области, тем больше мы можем сделать. Лично я слежу за развитием в области манипуляторов, особенно в том, что касается сложных динамичных манипуляций с использованием трения, манипуляций с гибкими податливыми предметами, веревками и так далее.
На наших глазах происходит переход от простых манипуляций в формате «поднять – переместить – отпустить», к более осмысленному взаимодействию с окружающей средой. Эти исследования позволят раскрыть потенциал мобильных манипуляторов, и, как мне кажется, позволят роботам полноценно взаимодействовать с окружающим миром.
Что еще вы хотите сказать зрителям этого видео?
Лично я хотел бы, чтобы больше людей проводили больше времени с роботами, чтобы они лучше понимали возможности и ограничения современной робототехники. Мы получаем много мнений и идей от людей, которые смотрят наши видео. И мне кажется, если они проводили больше времени с роботами, у них повысился бы уровень понимания и они придумывали бы больше применений для роботов в повседневной жизни. Я считаю, что робототехника имеет огромный потенциал, и я хотел бы, чтобы как можно больше людей шли по этому пути.
Танец Робота обучение для начинающих (NEW) ВСЕ УРОКИ >>>
Робот – один из стилей современного уличного танца. Стиль робот лежал в основе стиля поппинг ( popping dance). Направление робот оказало сильное влияние на развитие других направлений, таких как танец дабстеп, электрик буги. Даже в стиле хип-хоп применяются техники взятые из стиля робот. Поэтому обучение роботу сделает Ваш танец более выразительным и сногсшибательным.
1. О танце робот. Базовая техника танец робот (обучение видео курс по роботу)
В первую очередь, обратите внимание на фиксацию дайм стоп и на то, как правильно делать изоляции. Именно эти вещи дают ощущение механичности и железа, создавая по вашему желанию образ терминатора или движущегося комбайна))) Так же не спешите и не старайтесь угнаться за музыкой, ведь ваш робот не опаздывает на поезд!
Еще один маленький секрет, который позволит Вам выносить мозг любому зрителю. Постарайтесь не просто двигаться как робот, а постарайтесь в момент танца стать роботом! Тогда все Ваши движения преобразятся и станут правдивыми!

2. Последовательности в robot dance. Обучение для начинающих
3. Движения руками в стиле робот: онлайн урок танца робот
У многих новичков часто возникает вопрос: а что можно делать в роботе? Какие двжиения можно использовать в танце робот? 80% движений в стиле робот совершаются руками. А значит, Вы должны знать и уметь это делать. В этом уроке будут подробно разобраны разные варианты того, как должны двигаться руки. Даже используя только их, можно создавать очень крутые номера и вводить зрителя в полнейший транс.
4. Движения корпусом. Robot dance tutorial
Как правильно делать наклоны? Можно ли использовать повороты, и что необходимо для того, чтобы Ваше тело стало телом настоящего «железного» робота. Мы разберем базовые движения корпусом во время танца, а так же Вы узнаете о принципе «фрагментарности» и научитесь его применять.
5. Передвижения или походка робота. Онлайн видео урок по роботу.
В этом видео уроке Вы сможете научиться ходить как робот. Я покажу несколько вариантов походки, которая сделает образ робота в вашем танце более цельным и «железным». Есть передвижения простые, которые подойдут новичкам, так и чуть посложнее. В любом случае, я уверен, что потратив совсем немного времени, Вы сможете научиться танцевать робота! Тем более, оно того стоит!
6. Микроконтроль и изоляция. Обучение танец робот.
Хотите научиться танцевать робота действительно круто? Чтобы люди увидев Ваш танец стояли открыв рот? Тогда пора «проточить» технику и поработать над важной деталью, такой как «микроконтроль». Вы узнаете одну концепцию, которая поможет Вам выделяться среди других людей и танцоров.
ОБРАЗОВАНИЕ В МОСКВЕ
Танец Робота – один из стилей верхнего Брейк-данса. Более того, он послужил основой остальным направлениям «роботизации».
История стиля
Основоположником стиля считается мим из Америки – Роберт Шилдс, который стал популярным благодаря американскому телевизионному шоу Shiеlds&Yаrnell. Роберт
Шилдс вместе со своей партнершей Ярнел, двое очень талантливых актера, демонстрировали публике пантомиму.
Пантоми́ма — вид сценического искусства, в котором основным средством создания художественного образа является пластика человеческого тела, без использования слов. Как вид театрального искусства пантомима существует с древнейших времён.
Основа техники:
Основой классического танца в стиле robot является владение техникой даймстопа – способность на время замереть, стоя на одной ноге, на воображаемой монете.
Принципом стиля является «изоляция» движений. Самым сложным в исполнении робота является точечное владение мышцами – это очень трудоемко. Владение мышцами распространяется не только на руки, ноги и тело, мимика также вовлекается в процесс.
Танцор всем свои видом должен передать ощущение, как будто робот пытается выполнять человеческие движения. Подвижные суставы рук и ног – это шарниры, которыми выполняются вращательные движения.
В первую очередь, обратите внимание на фиксацию дайм стоп и на то, как правильно делать изоляции. Именно эти вещи дают ощущение механичности и железа, создавая по вашему желанию образ терминатора или движущегося комбайна)))
Так же не спешите и не старайтесь угнаться за музыкой, ведь ваш робот не опаздывает на поезд!
Еще один маленький секрет, который позволит Вам выносить мозг любому зрителю. Постарайтесь не просто двигаться как робот, а постарайтесь в момент танца стать роботом! Тогда все Ваши движения преобразятся и станут правдивыми!
Как таковой базовой техники в этом стиле нет, но ее заменяют принципы исполнения танца.
То есть одно следующее движение не начинается, пока не закончиться предыдущее.
Разумеется, из этого правила, как из любого правила есть исключения, но на первых порах это здорово помогает избежать каши и неразберихи при исполнении танца.
Вот, в общем, главное, что надо знать для успешного освоения этого зрелищного стиля!
Подобные стили
Тем, кто овладел искусством танца робот, не составит труда выучить движения похожих стилей, например:
Танец Робота обучение для начинающих (NEW) ВСЕ УРОКИ >>>
Робот – один из стилей современного уличного танца. Стиль робот лежал в основе стиля поппинг ( popping dance). Направление робот оказало сильное влияние на развитие других направлений, таких как танец дабстеп, электрик буги. Даже в стиле хип-хоп применяются техники взятые из стиля робот. Поэтому обучение роботу сделает Ваш танец более выразительным и сногсшибательным.
1. О танце робот. Базовая техника танец робот (обучение видео курс по роботу)
В первую очередь, обратите внимание на фиксацию дайм стоп и на то, как правильно делать изоляции. Именно эти вещи дают ощущение механичности и железа, создавая по вашему желанию образ терминатора или движущегося комбайна))) Так же не спешите и не старайтесь угнаться за музыкой, ведь ваш робот не опаздывает на поезд!
Еще один маленький секрет, который позволит Вам выносить мозг любому зрителю. Постарайтесь не просто двигаться как робот, а постарайтесь в момент танца стать роботом! Тогда все Ваши движения преобразятся и станут правдивыми!

2. Последовательности в robot dance. Обучение для начинающих
3. Движения руками в стиле робот: онлайн урок танца робот
У многих новичков часто возникает вопрос: а что можно делать в роботе? Какие двжиения можно использовать в танце робот? 80% движений в стиле робот совершаются руками. А значит, Вы должны знать и уметь это делать. В этом уроке будут подробно разобраны разные варианты того, как должны двигаться руки. Даже используя только их, можно создавать очень крутые номера и вводить зрителя в полнейший транс.
4. Движения корпусом. Robot dance tutorial
Как правильно делать наклоны? Можно ли использовать повороты, и что необходимо для того, чтобы Ваше тело стало телом настоящего «железного» робота. Мы разберем базовые движения корпусом во время танца, а так же Вы узнаете о принципе «фрагментарности» и научитесь его применять.
5. Передвижения или походка робота. Онлайн видео урок по роботу.
В этом видео уроке Вы сможете научиться ходить как робот. Я покажу несколько вариантов походки, которая сделает образ робота в вашем танце более цельным и «железным». Есть передвижения простые, которые подойдут новичкам, так и чуть посложнее. В любом случае, я уверен, что потратив совсем немного времени, Вы сможете научиться танцевать робота! Тем более, оно того стоит!
6. Микроконтроль и изоляция. Обучение танец робот.
Хотите научиться танцевать робота действительно круто? Чтобы люди увидев Ваш танец стояли открыв рот? Тогда пора «проточить» технику и поработать над важной деталью, такой как «микроконтроль». Вы узнаете одну концепцию, которая поможет Вам выделяться среди других людей и танцоров.